Я наверное что-то не понял.
Видимо то, что я называл "Скорость" или "регулировка скорости" это и есть скважность (из описания драйвера):Цитата: Регулировка скорости достигается с 7-битные или 8-битный широтно-импульсной модуляцией (ШИМ) в одном из нескольких выбираемых частотах. 7-битные управления позволяет для частот ШИМ 19,7 кГц, 2,5 кГц и 310 Гц, 8-бит управления позволяет для частот ШИМ 9,8 кГц, 1,2 кГц и 150 Гц.Максимально достижимого частоте 19,7 кГц ультразвуковой, что может привести к тихой управления двигателем. Более низкие частоты могут производить громче шум двигателя, но они могут помочь уменьшить потери мощности в связи с переключением. И как раз наверное 0...127 (255) это и есть задание скважностиЦитата: Электронная регулировка скорости достигается изменением части цикла, что двигатель выходы вождения. Полная скорость возникает тогда, когда мощности двигателя за рулем 100% времени (один мощностью двигателя проходит на прежнем уровне VIN, а другой на прежнем уровне земли). В 7-битном режиме, диапазон скорости двигателя от остановки (высокий импеданс выхода, или «берег») до полной скорости, что и параметр скорости в диапазоне от 0 до 127. В 8-битном режиме, диапазон скорости двигателя от остановки (высокий импеданс выхода, или «берег») до полной скорости, что и диапазоны параметров скорости от 0 - 255. Источник: http://www.pololu.com/docs/0J29/5.f
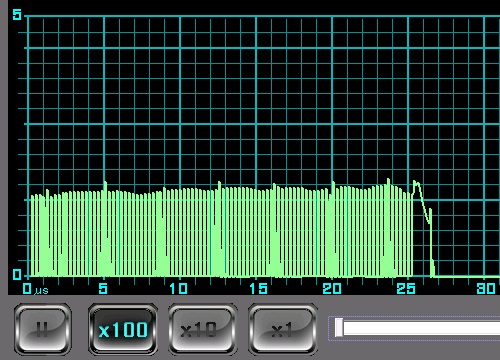
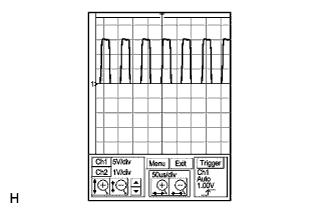
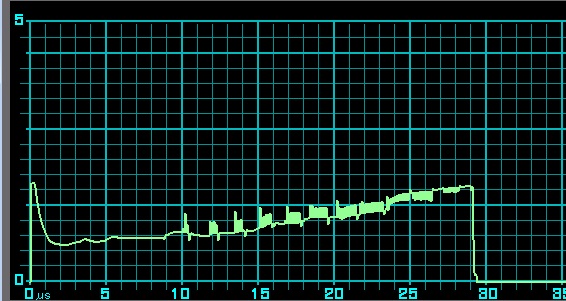
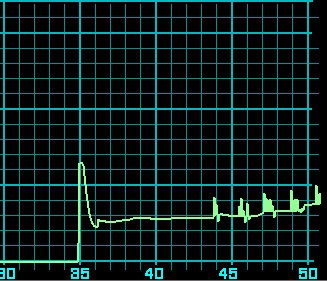
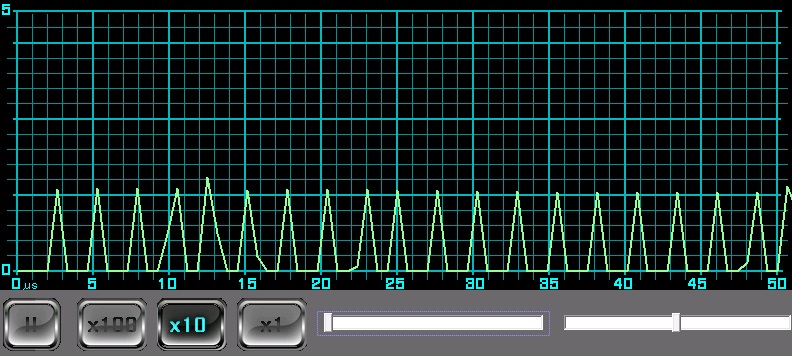
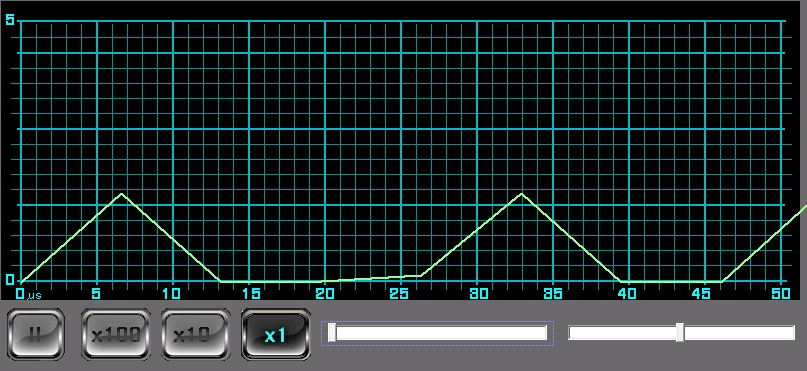
Кстати переключил драйвер в режим 9,8кГц.
При скважности 50% двигатель страгивается, но дальше мощи не хватает. Изменив скважность 80% (20) - хватает, 100% (0) - вообще пролетает.
Кстати осциллографа нормального и нет, до 5кГц только.
Вот замерил сигнал скважностью 70% при 9.8кГц
|
 ,
,  ,
, 
 <-
<- 
 ,
, 
{kind=link}
{kind=link}